|
I am a Computer Science grad student at University at Buffalo, where my primary research focus is in computer vision. I love to implement these concepts in the field of autonomous robots and human-computer interaction. My experience includes SLAM (Simuntaneous Localization & Mapping) characterization and Neural Network based Dorsal Hand Vein based Biometric systems via projects. Pursuing my Masters thesis on biometric authentication on low quality images captured from Humanoid robots mostly due to smaller camera aperture. I am advised by Prof. Nalini Ratha and Prof. Karthik Dantu. Email / Resume / Google Scholar / LinkedIn / Github |

|
{kind=link}
|
The field of image processing fascinates me, it has immense potential of being applied in various fields. Deep-learning makes it more powerful and independent of the use-cases. I have been doing various projects on deep-learning based biometrics. One of my work is on Dorsal-Vein biometrics, to make it as a robust authentication system. I am also actively engaged in improving the performance of these systems by using biometric fusions as well as combining different CNN-classifiers. I have also worked in the vision side of robotics namely on SLAM systems. The OPEN VINS SLAM became a gateway for understanding, as this is the first paper I started reading on this topic. The more I dived deep, I undertsood that these are a universe of its own and can be implemented using different methods, like traditional filter based as well as deep-learning based. These different methods results in different characterization/performance. The deep learning implementaion in SLAM systems is a bit new and has huge potential. To understand this implementation DROID SLAM turned into the gateway for me. While reading this paper I saw a strking fearure that this is far mmore robust than most of the systems but presently its lacking in real-time performance. I would like to dive deep and see how can we furthur improve these kind of implementations. |
|
|
|
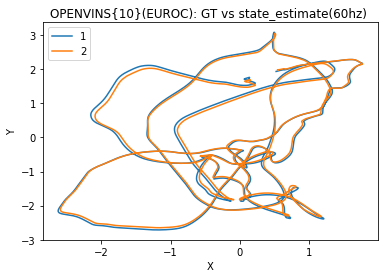
Sougato Bagchi, Sofiya Semenova Advisor:- Karthik Dantu Project Report My interest is understanding the behavior of the SLAM systems when they are executed on different hardware, especially on embedded systems. I have worked on Open Vins and made a detailed study of its core modules and the behavior these Extended-Kalman Filter based Systems. I have compared its performance wrt ORB SLAM 2 and other state of the art systems, in terms of ATE(Absolute trajectory error) with datasets that are fairly long(in metres) to perform these experimentations. |

|
I had taken deep interest in CSE 568 (Robotics Algorithm) during my Fall 2021 semester. Projects like "Implementation of Obstacle avoidance on the F1tenth virtual platform", "Robot navigation using algorithms like Bug2" and "Finding the shortest path using A* algorithm" fortified my interest in this field. The theoritical aspects of a robot's behavior or especially the physics behind these systems are fascianting. |

|
Sougato Bagchi Advisor :- Nalini Ratha
Implementation of face authentication systems by keeping in mind their hardware constraints. Goal is to create person specific
behaviors, these can be the robot dog follows the commands of only a particular person says (using voice authentication) or the
humanoid robots singing a song only in front of a designated person.
|
|
|

|
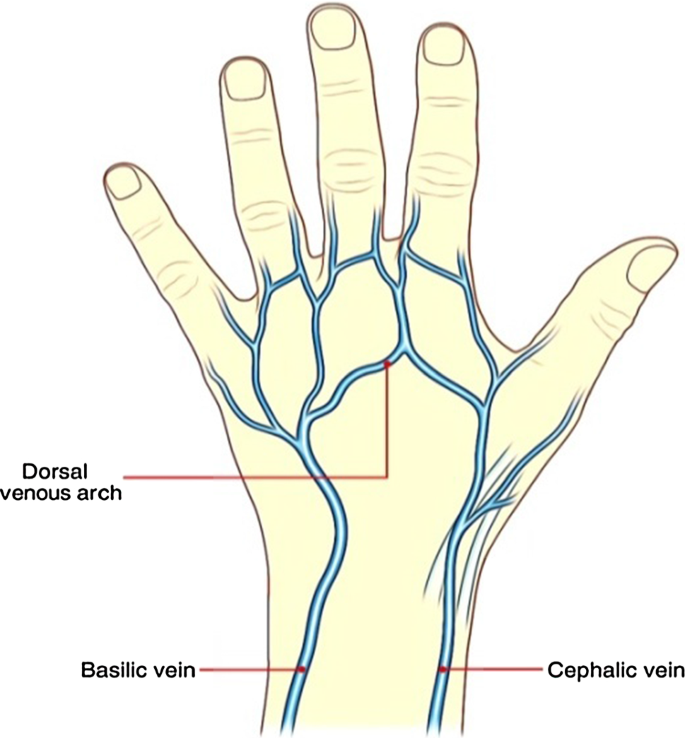
Sougato Bagchi, Geetartho Chanda, Akshay Agarwal, Nalini Ratha IEEE WNYISPW, 2022 project page / dataset ref / paper We are using Dorsal Hand Vein images captured using infrared light as a non-contact based biometric. Authentication system is built upon different types of Neural Network and we hope to implement it our dataset in the future. |
|
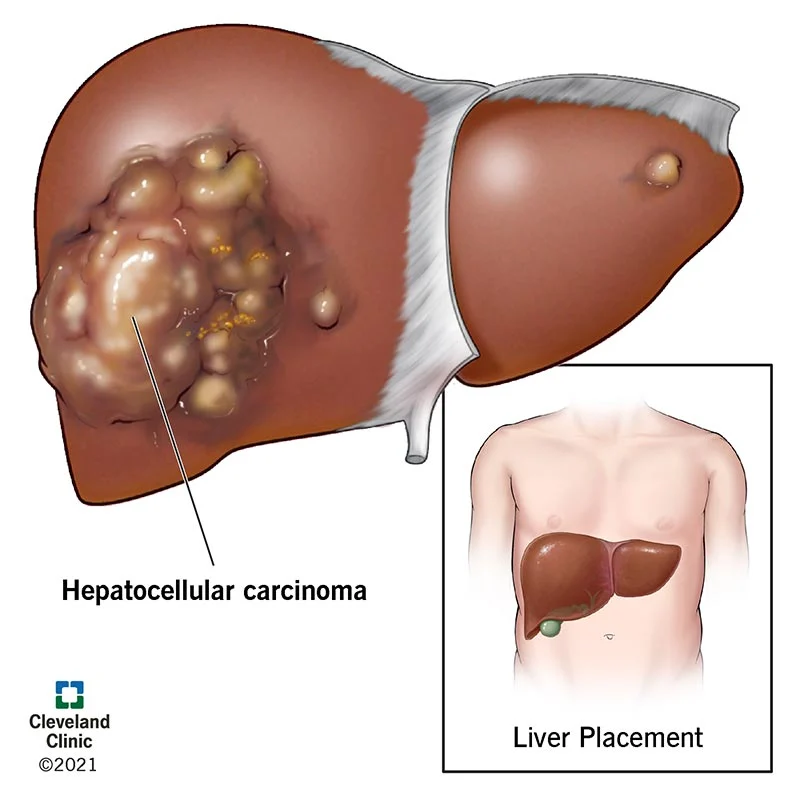
Chayan Kumar Kayal, Sougato Bagchi, Debraj Dhar, Tirtha Maitra, Sankhadeep Chatterjee Proceedings of International Ethical Hacking Conference, 2018 project page / paper Prediction of survival for a patient with HCC |
|
The source code is a gift, check here for the sourcecode. Btw I am a lazy person so I prefer showcasing on a single page. :) |